📖 Univariate and bivariate optimization#
⏱ | words
Announcements & Reminders
Tutorials start(ed) this week
Make sure you register for tutorials on course pages
Reminder on how to ask questions:
Administrative: RSE admin
Content/understanding: tutors
Other: to Fedor
Note
While computation is not a formal part of the course
there will be little bits of code in the lectures to illustrate the kinds of things we can do.
All the code will be written in the Python programming language
It is not assessable
You might find value in actually running the code shown in lectures
If you want to do so please refer to linked GitHub repository (upper right corner)
Univariate Optimization#
Let \(f \colon [a, b] \to \mathbb{R}\) be a differentiable (smooth) function
\([a, b]\) is all \(x\) with \(a \leq x \leq b\)
\(\mathbb{R}\) is “all numbers”
\(f\) takes \(x \in [a, b]\) and returns number \(f(x)\)
derivative \(f'(x)\) exists for all \(x\) with \(a < x < b\)
Definition
A point \(x^* \in [a, b]\) is called a
maximizer of \(f\) on \([a, b]\) if \(f(x^*) \geq f(x)\) for all \(x \in [a,b]\)
minimizer of \(f\) on \([a, b]\) if \(f(x^*) \leq f(x)\) for all \(x \in [a,b]\)
Show code cell content
from myst_nb import glue
import matplotlib.pyplot as plt
import numpy as np
def subplots():
"Custom subplots with axes through the origin"
fig, ax = plt.subplots()
# Set the axes through the origin
for spine in ['left', 'bottom']:
ax.spines[spine].set_position('zero')
for spine in ['right', 'top']:
ax.spines[spine].set_color('none')
return fig, ax
xmin, xmax = 2, 8
xgrid = np.linspace(xmin, xmax, 200)
f = lambda x: -(x - 4)**2 + 10
xstar = 4.0
fig, ax = subplots()
ax.plot([xstar], [0], 'ro', alpha=0.6)
ax.set_ylim(-12, 15)
ax.set_xlim(-1, 10)
ax.set_xticks([2, xstar, 6, 8, 10])
ax.set_xticklabels([2, r'$x^*=4$', 6, 8, 10], fontsize=14)
ax.plot(xgrid, f(xgrid), 'b-', lw=2, alpha=0.8, label=r'$f(x) = -(x-4)^2+10$')
ax.plot((xstar, xstar), (0, f(xstar)), 'k--', lw=1, alpha=0.8)
#ax.legend(frameon=False, loc='upper right', fontsize=16)
glue("fig_maximizer", fig, display=False)
xstar = xmax
fig, ax = subplots()
ax.plot([xstar], [0], 'ro', alpha=0.6)
ax.text(xstar, 1, r'$x^{**}=8$', fontsize=16)
ax.set_ylim(-12, 15)
ax.set_xlim(-1, 10)
ax.set_xticks([2, 4, 6, 10])
ax.set_xticklabels([2, 4, 6, 10], fontsize=14)
ax.plot(xgrid, f(xgrid), 'b-', lw=2, alpha=0.8, label=r'$f(x) = -(x-4)^2+10$')
ax.plot((xstar, xstar), (0, f(xstar)), 'k--', lw=1, alpha=0.8)
#ax.legend(frameon=False, loc='upper right', fontsize=16)
glue("fig_minimizer", fig, display=False)
xmin, xmax = 0, 1
xgrid1 = np.linspace(xmin, xmax, 100)
xgrid2 = np.linspace(xmax, 2, 10)
fig, ax = subplots()
ax.set_ylim(0, 1.1)
ax.set_xlim(-0.0, 2)
func_string = r'$f(x) = x^2$ if $x < 1$ else $f(x) = 0.5$'
ax.plot(xgrid1, xgrid1**2, 'b-', lw=3, alpha=0.6, label=func_string)
ax.plot(xgrid2, 0 * xgrid2 + 0.5, 'b-', lw=3, alpha=0.6)
#ax.legend(frameon=False, loc='lower right', fontsize=16)
glue("fig_none", fig, display=False)
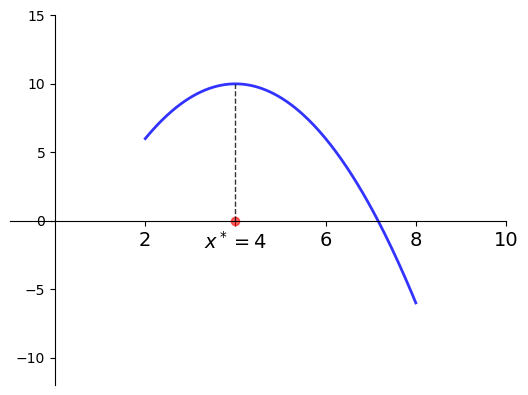
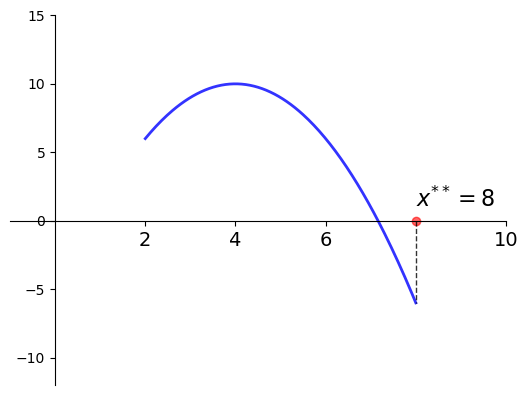
Example
Let
\(f(x) = -(x-4)^2 + 10\)
\(a = 2\) and \(b=8\)
Then
\(x^* = 4\) is a maximizer of \(f\) on \([2, 8]\)
\(x^{**} = 8\) is a minimizer of \(f\) on \([2, 8]\)
Fig. 1 Maximizer on \([a, b] = [2, 8]\) is \(x^* = 4\)#
Fig. 2 Minimizer on \([a, b] = [2, 8]\) is \(x^{**} = 8\)#
The set of maximizers/minimizers can be
empty
a singleton (contains one element)
finite (contains a number of elements)
infinite (contains infinitely many elements)
Example: infinite maximizers
\(f \colon [0, 1] \to \mathbb{R}\) defined by \(f(x) =1\)
has infinitely many maximizers and minimizers on \([0, 1]\)
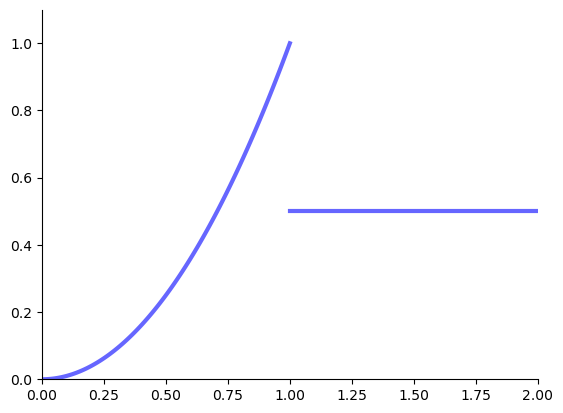
Example: no maximizers
The following function has no maximizers on \([0, 2]\)
Fig. 3 No maximizer on \([0, 2]\)#
Definition
Point \(x\) is called interior to \([a, b]\) if \(a < x < b\)
The set of all interior points is written \((a, b)\)
We refer to \(x^* \in [a, b]\) as
interior maximizer if both a maximizer and interior
interior minimizer if both a minimizer and interior
Finding optima#
Definition
A stationary point of \(f\) on \([a, b]\) is an interior point \(x\) with \(f'(x) = 0\)
Fig. 4 Interior maximizers/minimizers are stationary points.#
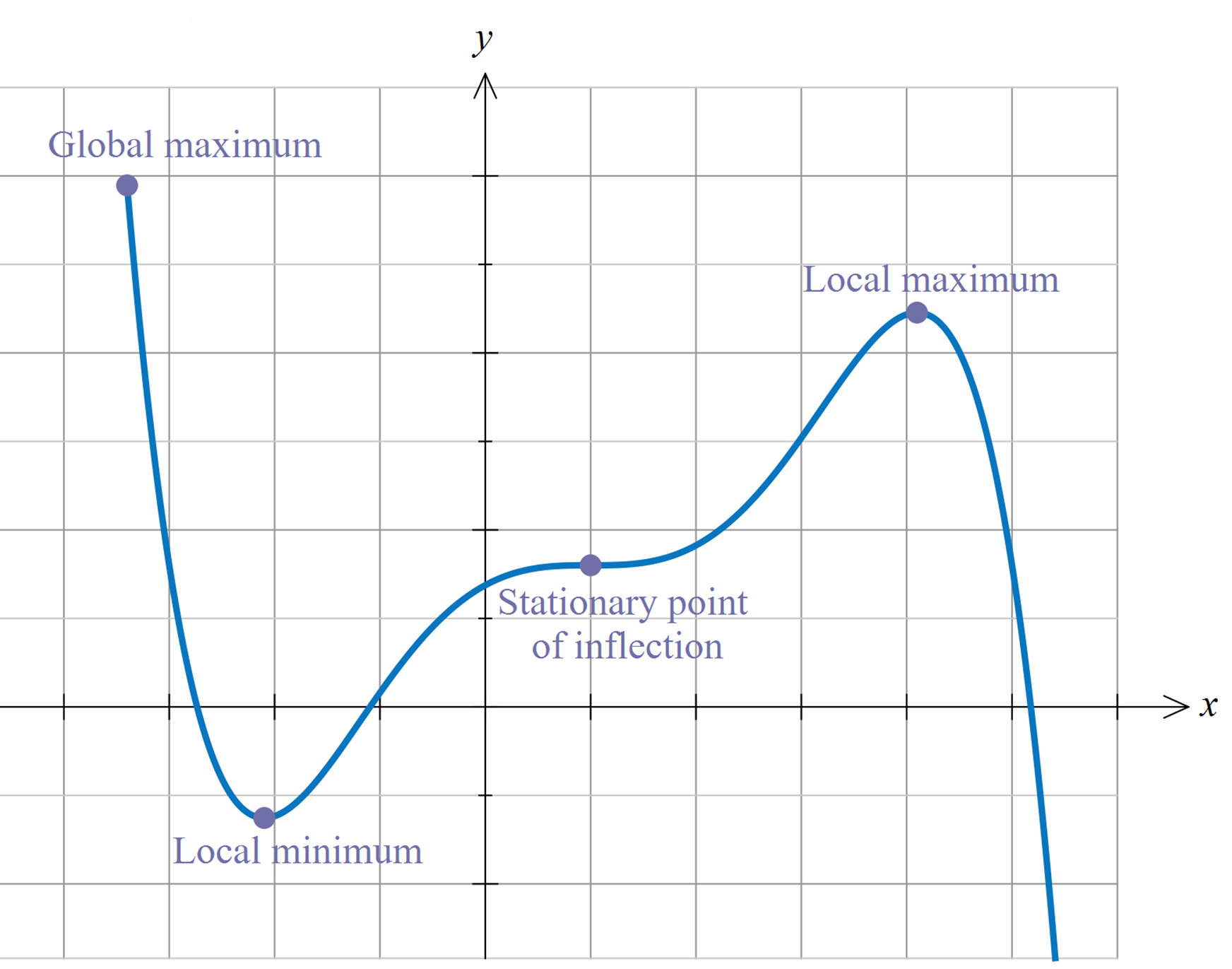
Fig. 5 Not all stationary points are maximizers!#
Fact
If \(f\) is differentiable and \(x^*\) is either an interior minimizer or an interior maximizer of \(f\) on \([a, b]\), then \(x^*\) is stationary
Sketch of proof, for maximizers:
If \(f'(x^*) \ne 0\) then exists small \(h\) such that \(f(x^* + h) > f(x^*)\)
Hence interior maximizers must be stationary — otherwise we can do better
Fact
Previous fact \(\implies\)
\(\implies\) any interior maximizer stationary
\(\implies\) set of interior maximizers \(\subset\) set of stationary points
\(\implies\) maximizers \(\subset\) stationary points \(\cup \{a\} \cup \{b\}\)
Algorithm for univariate problems
Locate stationary points
Evaluate \(y = f(x)\) for each stationary \(x\) and for \(a\), \(b\)
Pick point giving largest \(y\) value
Minimization: same idea
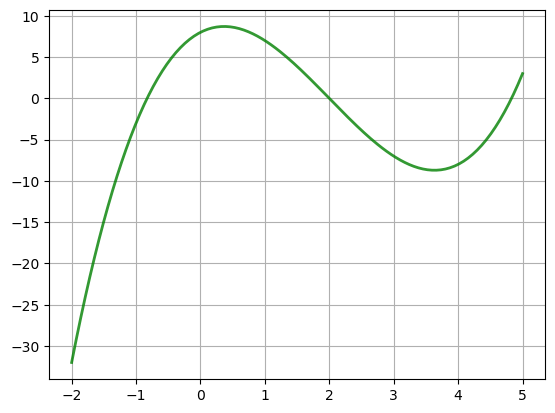
Example
Let’s solve
Steps
Differentiate to get \(f'(x) = 3x^2 - 12x + 4\)
Solve \(3x^2 - 12x + 4 = 0\) to get stationary \(x\)
Discard any stationary points outside \([-2, 5]\)
Eval \(f\) at remaining points plus end points \(-2\) and \(5\)
Pick point giving largest value
from sympy import *
x = Symbol('x')
points = [-2, 5]
f = x**3 - 6*x**2 + 4*x + 8
fp = diff(f, x)
spoints = solve(fp, x)
points.extend(spoints)
v = [f.subs(x, c).evalf() for c in points]
maximizer = points[v.index(max(v))]
print("Maximizer =", str(maximizer),'=',maximizer.evalf())
Maximizer = 2 - 2*sqrt(6)/3 = 0.367006838144548
Show code cell source
import matplotlib.pyplot as plt
import numpy as np
xgrid = np.linspace(-2, 5, 200)
f = lambda x: x**3 - 6*x**2 + 4*x + 8
fig, ax = plt.subplots()
ax.plot(xgrid, f(xgrid), 'g-', lw=2, alpha=0.8)
ax.grid()
Shape Conditions and Sufficiency#
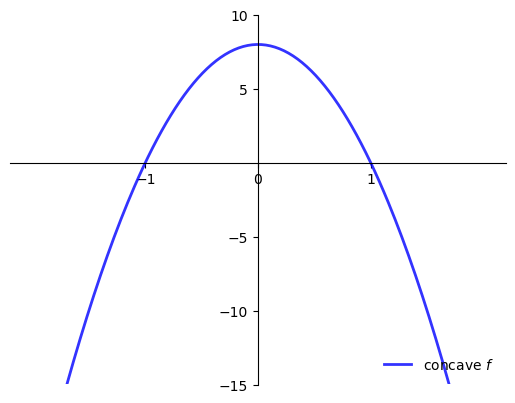
When is \(f'(x^*) = 0\) sufficient for \(x^*\) to be a maximizer?
One answer: When \(f\) is concave
Show code cell source
xgrid = np.linspace(-2, 2, 200)
f = lambda x: - 8*x**2 + 8
fig, ax = subplots()
ax.set_ylim(-15, 10)
ax.set_yticks([-15, -10, -5, 5, 10])
ax.set_xticks([-1, 0, 1])
ax.plot(xgrid, f(xgrid), 'b-', lw=2, alpha=0.8, label='concave $f$')
ax.legend(frameon=False, loc='lower right')
plt.show()
(Full definition deferred)
Sufficient conditions for concavity in one dimension
Let \(f \colon [a, b] \to \mathbb{R}\)
If \(f''(x) \leq 0\) for all \(x \in (a, b)\) then \(f\) is concave on \((a, b)\)
If \(f''(x) < 0\) for all \(x \in (a, b)\) then \(f\) is strictly concave on \((a, b)\)
Example
\(f(x) = a + b x\) is concave on \(\mathbb{R}\) but not strictly
\(f(x) = \log(x)\) is strictly concave on \((0, \infty)\)
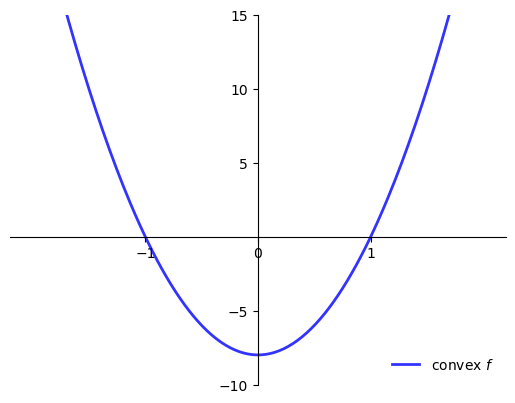
When is \(f'(x^*) = 0\) sufficient for \(x^*\) to be a minimizer?
One answer: When \(f\) is convex
Show code cell source
xgrid = np.linspace(-2, 2, 200)
f = lambda x: - 8*x**2 + 8
fig, ax = subplots()
ax.set_ylim(-10, 15)
ax.set_yticks([-10, -5, 5, 10, 15])
ax.set_xticks([-1, 0, 1])
ax.plot(xgrid, -f(xgrid), 'b-', lw=2, alpha=0.8, label='convex $f$')
ax.legend(frameon=False, loc='lower right')
plt.show()
(Full definition deferred)
Sufficient conditions for convexity in one dimension
Let \(f \colon [a, b] \to \mathbb{R}\)
If \(f''(x) \geq 0\) for all \(x \in (a, b)\) then \(f\) is convex on \((a, b)\)
If \(f''(x) > 0\) for all \(x \in (a, b)\) then \(f\) is strictly convex on \((a, b)\)
Example
\(f(x) = a + b x\) is convex on \(\mathbb{R}\) but not strictly
\(f(x) = x^2\) is strictly convex on \(\mathbb{R}\)
Sufficiency and uniqueness with shape conditions#
Fact
For maximizers:
If \(f \colon [a,b] \to \mathbb{R}\) is concave and \(x^* \in (a, b)\) is stationary then \(x^*\) is a maximizer
If, in addition, \(f\) is strictly concave, then \(x^*\) is the unique maximizer
Fact
For minimizers:
If \(f \colon [a,b] \to \mathbb{R}\) is convex and \(x^* \in (a, b)\) is stationary then \(x^*\) is a minimizer
If, in addition, \(f\) is strictly convex, then \(x^*\) is the unique minimizer
Example
A price taking firm faces output price \(p > 0\), input price \(w >0\)
Maximize profits with respect to input \(\ell\)
where the production technology is given by
Evidently
so unique stationary point is
Moreover,
for all \(\ell \ge 0\) so \(\ell^*\) is unique maximizer.
Show code cell content
p = 2.0
w = 1.0
alpha = 0.6
xstar = (alpha * p / w)**(1/(1 - alpha))
xgrid = np.linspace(0, 4, 200)
f = lambda x: x**alpha
pi = lambda x: p * f(x) - w * x
fig, ax = subplots()
ax.set_xticks([1,xstar,2,3])
ax.set_xticklabels(['1',r'$\ell^*$','2','3'], fontsize=14)
ax.plot(xgrid, pi(xgrid), 'b-', lw=2, alpha=0.8, label=r'$\pi(\ell) = p\ell^{\alpha} - w\ell$')
ax.plot((xstar, xstar), (0, pi(xstar)), 'g--', lw=1, alpha=0.8)
#ax.legend(frameon=False, loc='upper right', fontsize=16)
glue("fig_price_taker", fig, display=False)
glue("ellstar", round(xstar,4))
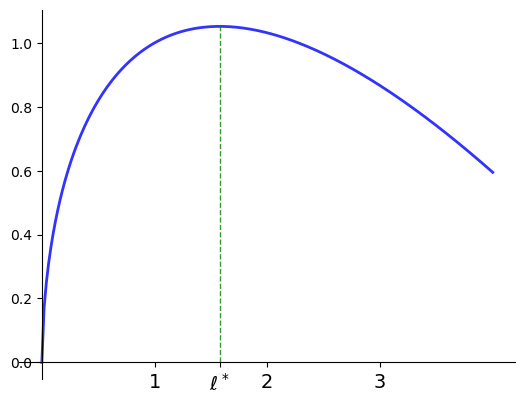
Fig. 6 Profit maximization with \(p=2\), \(w=1\), \(\alpha=0.6\), \(\ell^*=\)1.5774#
Functions of two variables#
Let’s have a look at some functions of two variables
How to visualize them
Slope, contours, etc.
Example: Cobb-Douglas production function
Consider production function
Let’s graph it in two dimensions.
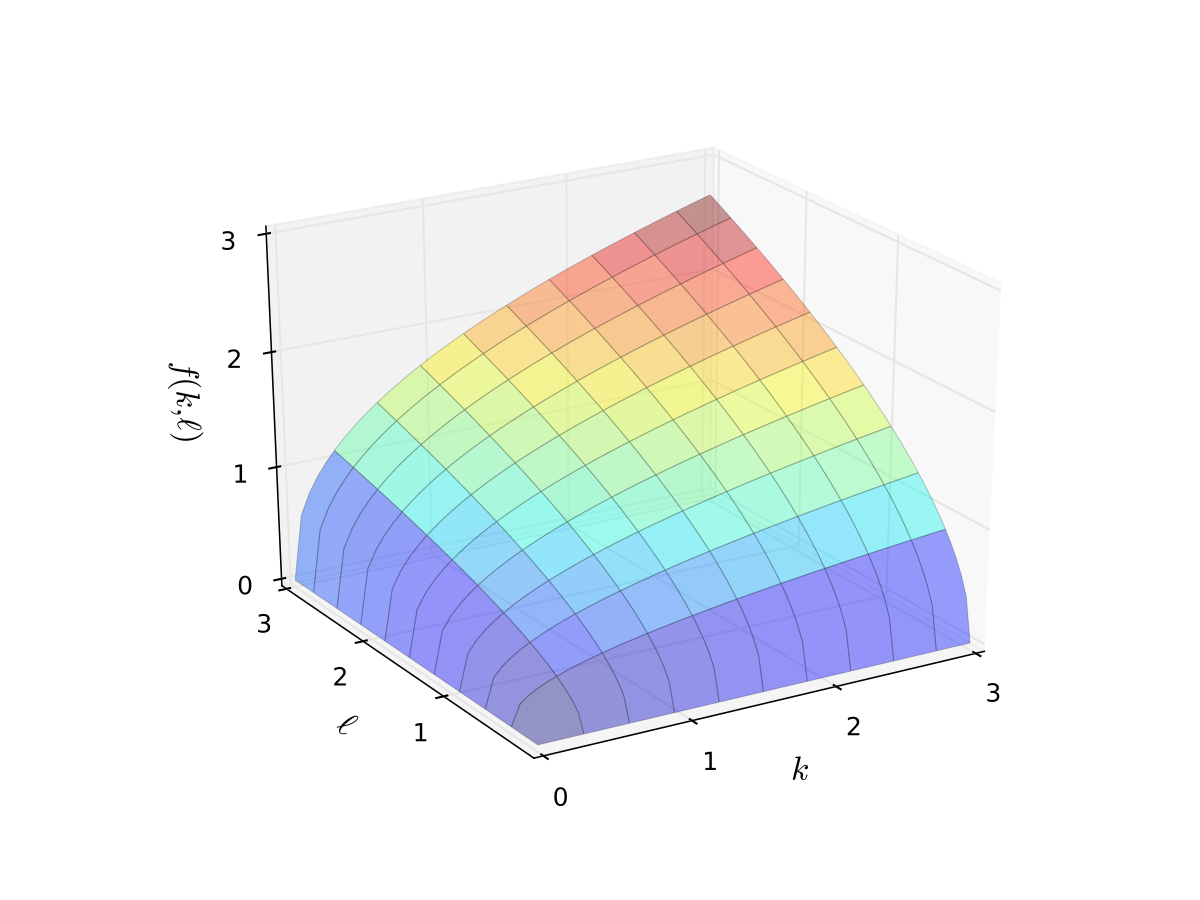
Fig. 7 Production function with \(\alpha=0.4\), \(\beta=0.5\) (a)#
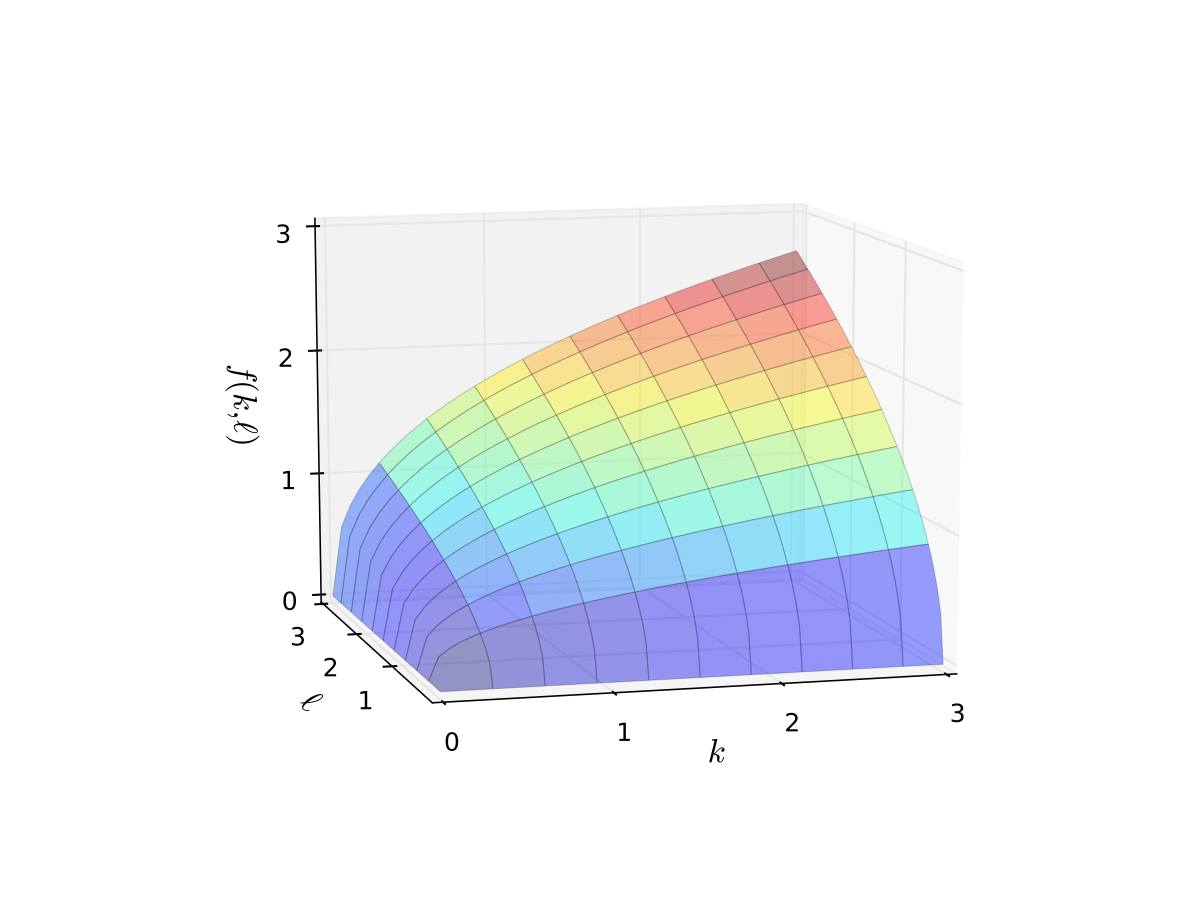
Fig. 8 Production function with \(\alpha=0.4\), \(\beta=0.5\) (b)#
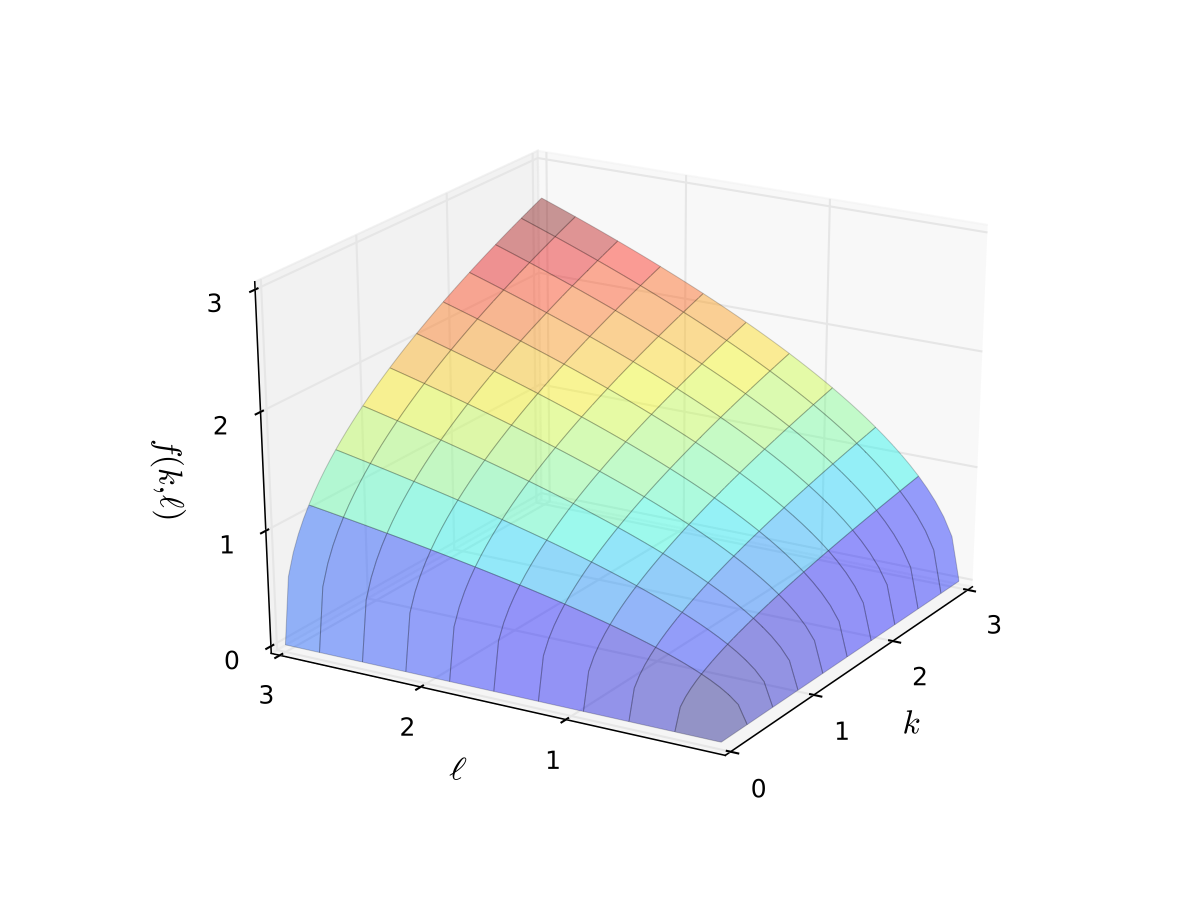
Fig. 9 Production function with \(\alpha=0.4\), \(\beta=0.5\) (c)#
Like many 3D plots it’s hard to get a good understanding
Let’s try again with contours plus heat map
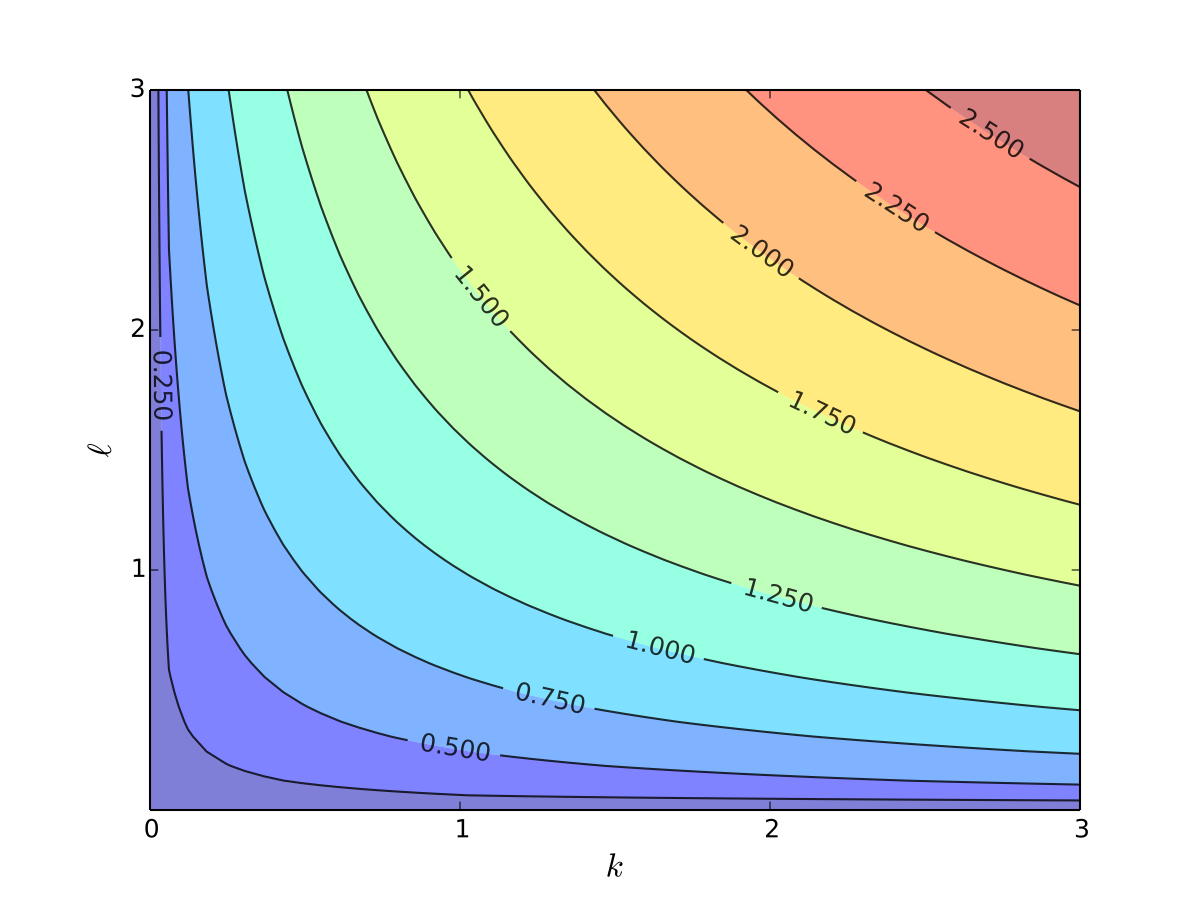
Fig. 10 Production function with \(\alpha=0.4\), \(\beta=0.5\), contours#
In this context the contour lines are called isoquants
Can you see how \(\alpha < \beta\) shows up in the slope of the contours?
We can drop the colours to see the numbers more clearly
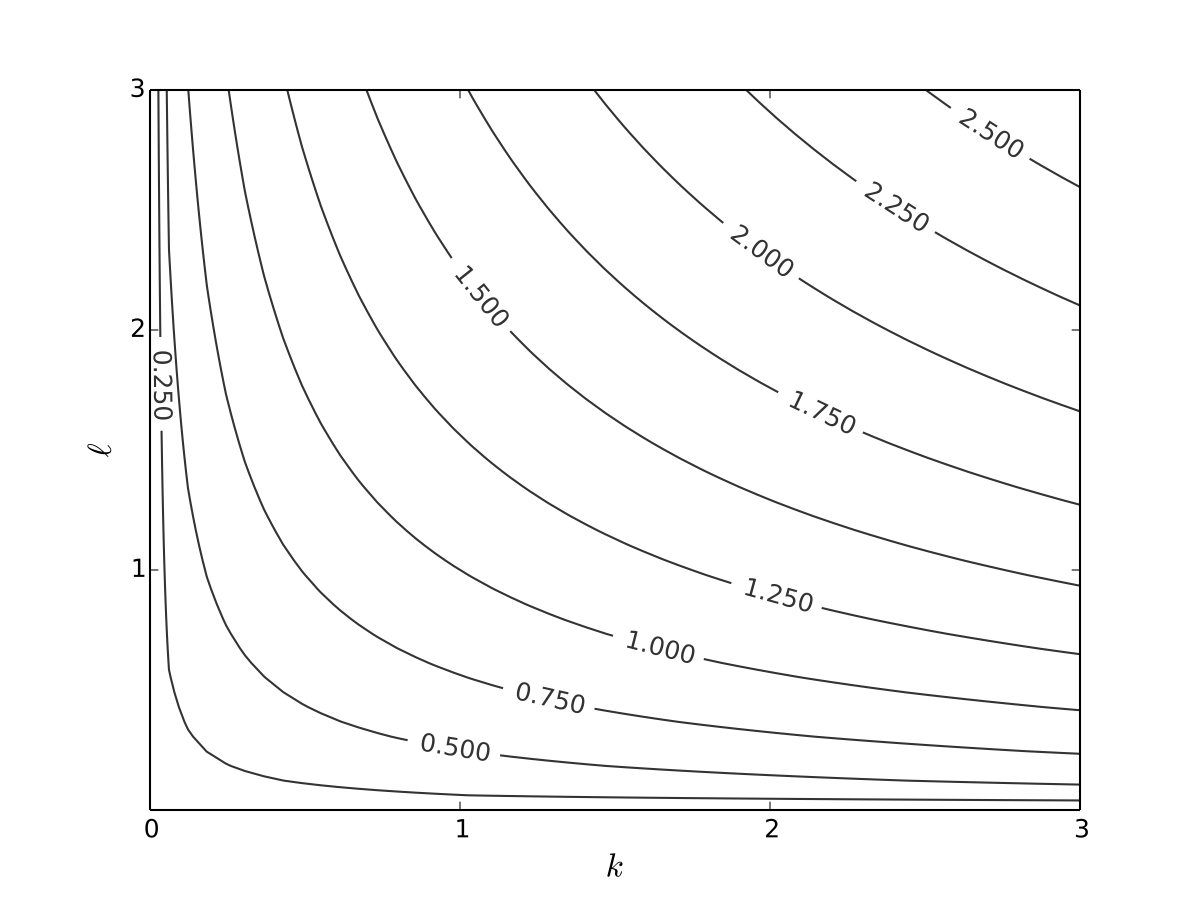
Fig. 11 Production function with \(\alpha=0.4\), \(\beta=0.5\)#
Example: log-utility
Let \(u(x_1,x_2)\) be “utility” gained from \(x_1\) units of good 1 and \(x_2\) units of good 2
We take
where
\(\alpha\) and \(\beta\) are parameters
we assume \(\alpha>0, \, \beta > 0\)
The log functions mean “diminishing returns” in each good
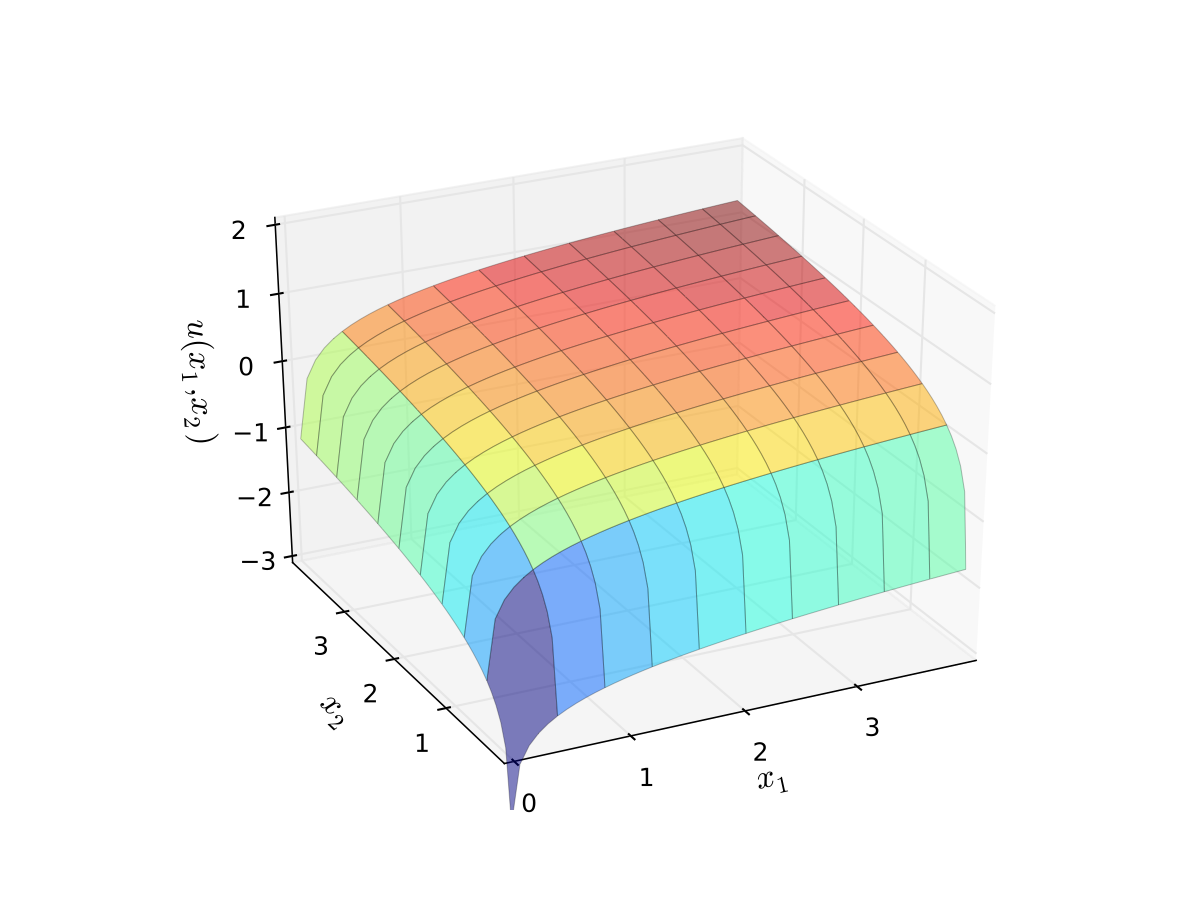
Fig. 12 Log utility with \(\alpha=0.4\), \(\beta=0.5\)#
Let’s look at the contour lines
For utility functions, contour lines called indifference curves
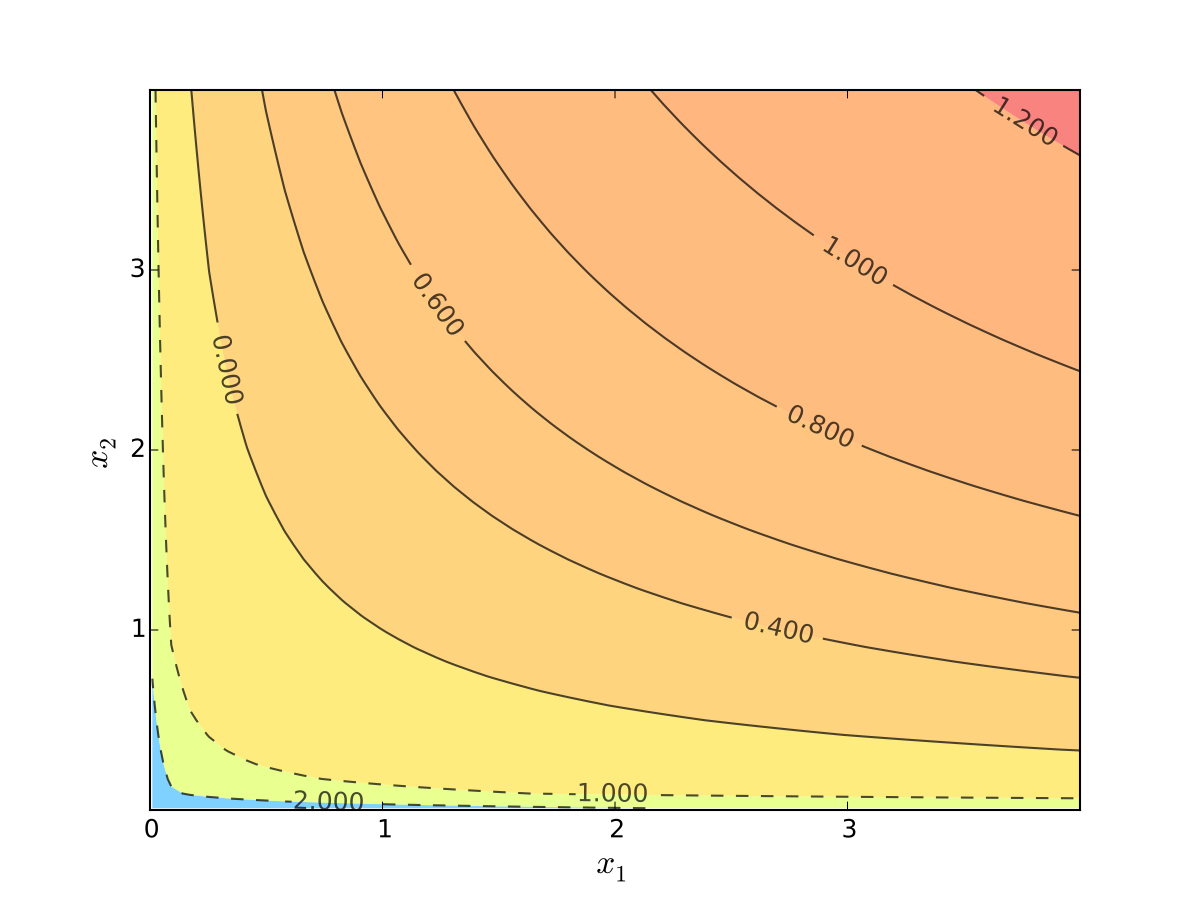
Fig. 13 Indifference curves of log utility with \(\alpha=0.4\), \(\beta=0.5\)#
Example: quasi-linear utility
Called quasi-linear because linear in good 1
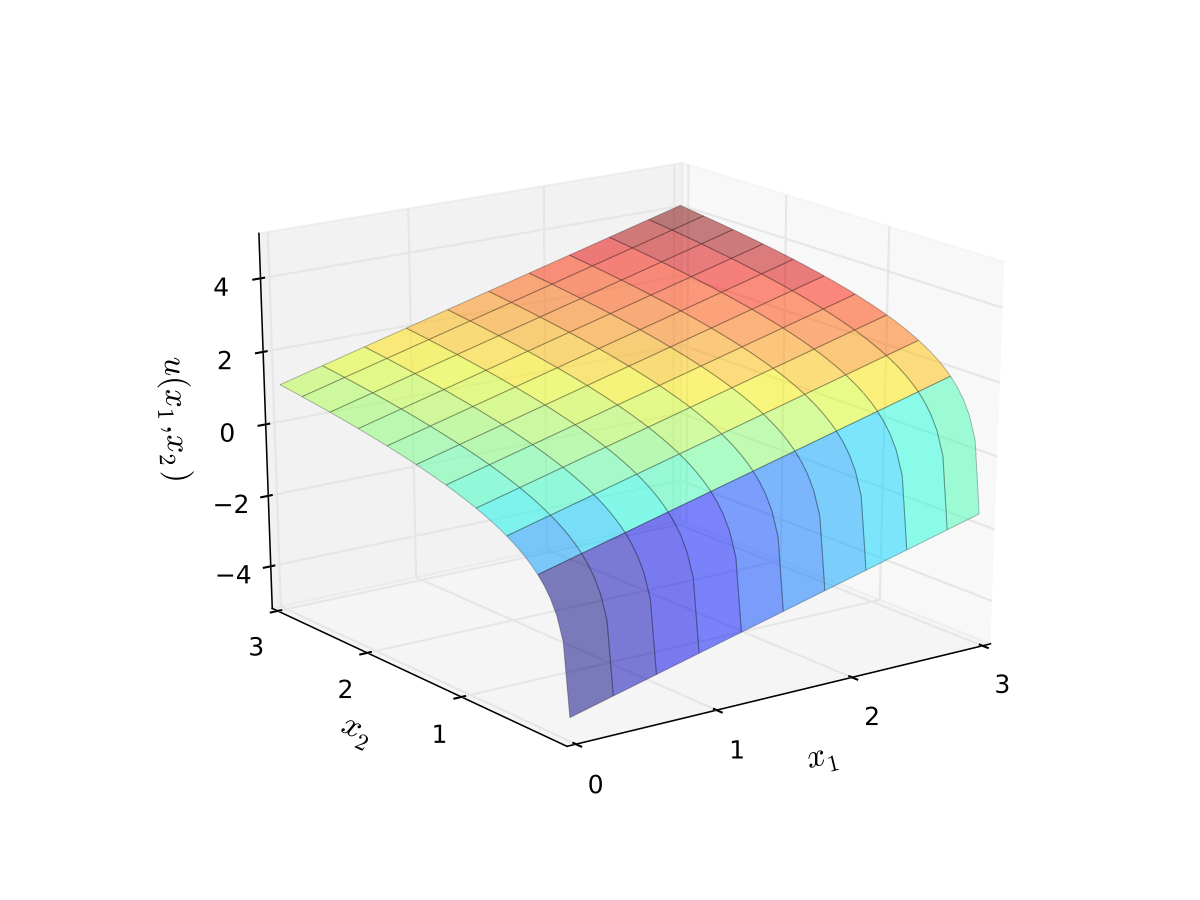
Fig. 14 Quasi-linear utility#
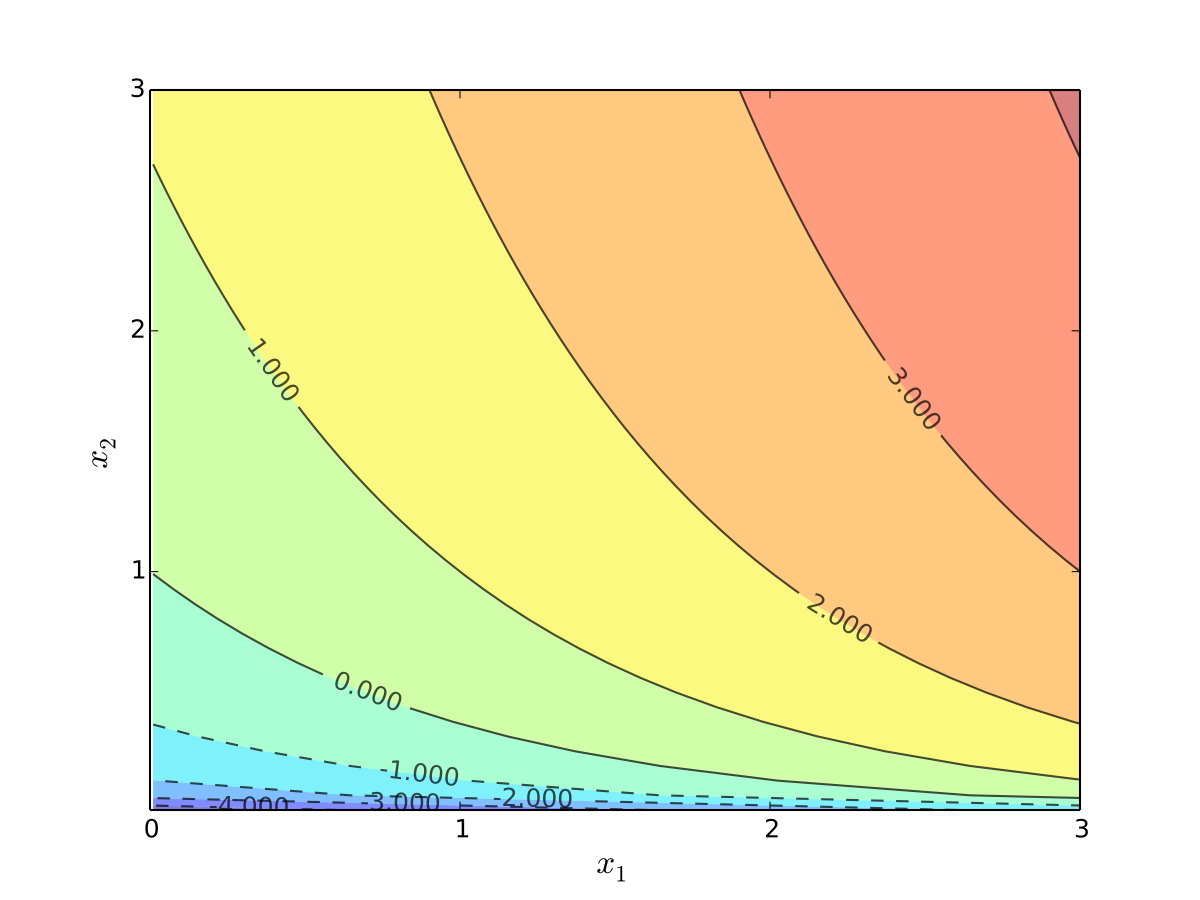
Fig. 15 Indifference curves of quasi-linear utility#
Example: quadratic utility
Here
\(b_1\) is a “satiation” or “bliss” point for \(x_1\)
\(b_2\) is a “satiation” or “bliss” point for \(x_2\)
Dissatisfaction increases with deviations from the bliss points
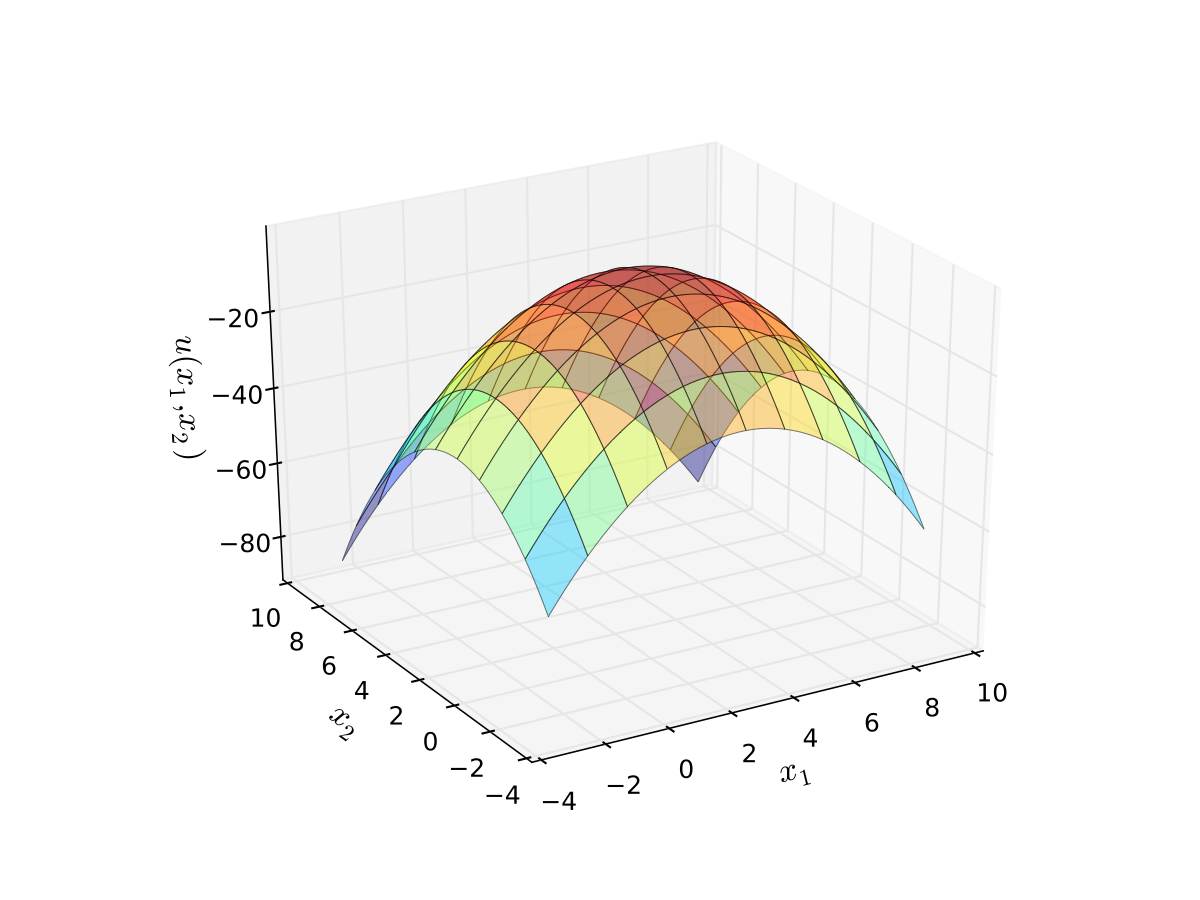
Fig. 16 Quadratic utility with \(b_1 = 3\) and \(b_2 = 2\)#
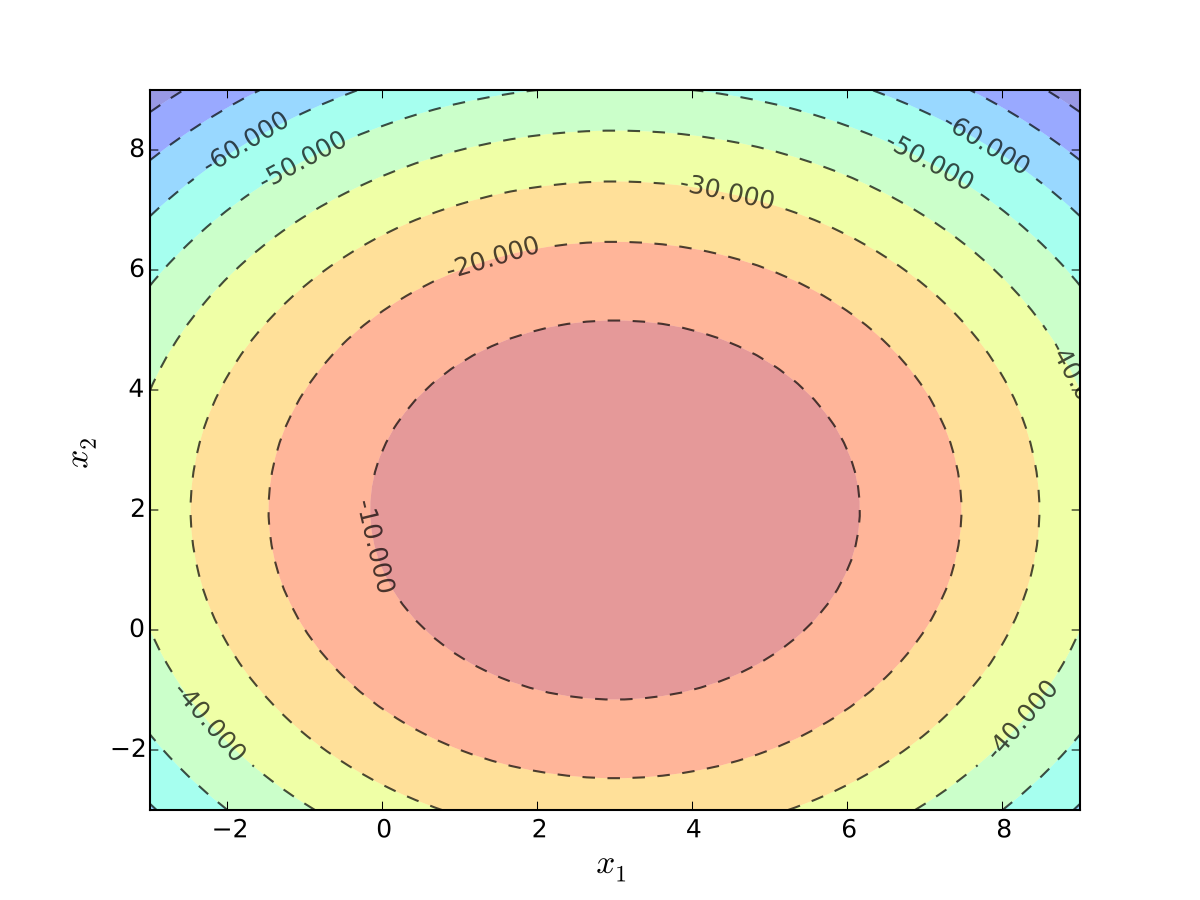
Fig. 17 Indifference curves quadratic utility with \(b_1 = 3\) and \(b_2 = 2\)#
Bivariate Optimization#
Consider \(f \colon I \to \mathbb{R}\) where \(I \subset \mathbb{R}^2\)
The set \(\mathbb{R}^2\) is all \((x_1, x_2)\) pairs
Definition
A point \((x_1^*, x_2^*) \in I\) is called a maximizer of \(f\) on \(I\) if
Definition
A point \((x_1^*, x_2^*) \in I\) is called a minimizer of \(f\) on \(I\) if
When they exist, the partial derivatives at \((x_1, x_2) \in I\) are
Example
When \(f(k, \ell) = k^\alpha \ell^\beta\),
Definition
An interior point \((x_1, x_2) \in I\) is called stationary for \(f\) if
Fact
Let \(f \colon I \to \mathbb{R}\) be a continuously differentiable function. If \((x_1^*, x_2^*)\) is either
an interior maximizer of \(f\) on \(I\), or
an interior minimizer of \(f\) on \(I\),
then \((x_1^*, x_2^*)\) is a stationary point of \(f\)
Usage, for maximization:
Compute partials
Set partials to zero to find \(S =\) all stationary points
Evaluate candidates in \(S\) and boundary of \(I\)
Select point \((x^*_1, x_2^*)\) yielding highest value
Example
Setting
gives the unique stationary point \((0, 0)\), at which \(f(0, 0) = 0\)
On the boundary we have \(x_1 + x_2 = 1\), so
Exercise: Show right hand side \(> 0\) for any \(x_1\)
Hence minimizer is \((x_1^*, x_2^*) = (0, 0)\)
Nasty secrets#
Solving for \((x_1, x_2)\) such that \(f_1(x_1, x_2) = 0\) and \(f_2(x_1, x_2) = 0\) can be hard
System of nonlinear equations
Might have no analytical solution
Set of solutions can be a continuum
Example
(Don’t) try to find all stationary points of
Also:
Boundary is often a continuum, not just two points
Things get even harder in higher dimensions
On the other hand:
Most classroom examples are chosen to avoid these problems
Life is still pretty easy if we have concavity / convexity
Clever tricks have been found for certain kinds of problems
Second Order Partials#
Let \(f \colon I \to \mathbb{R}\) and, when they exist, denote
Example: Cobb-Douglas technology with linear costs
If \(\pi(k, \ell) = p k^{\alpha} \ell^{\beta} - w \ell - r k\) then
Fact
If \(f \colon I \to \mathbb{R}\) is twice continuously differentiable at \((x_1, x_2)\), then
Exercise: Confirm the results in the exercise above.
Shape conditions in 2D#
Let \(I\) be an “open” set (only interior points – formalities next week)
Let \(f \colon I \to \mathbb{R}\) be twice continuously differentiable
Fact
The function \(f\) is strictly concave on \(I\) if, for any \((x_1, x_2) \in I\)
\(f_{11}(x_1, x_2) < 0\)
\(f_{11}(x_1, x_2) \, f_{22}(x_1, x_2) > f_{12}(x_1, x_2)^2\)
Fact
The function \(f\) is strictly convex on \(I\) if, for any \((x_1, x_2) \in I\)
\(f_{11}(x_1, x_2) > 0\)
\(f_{11}(x_1, x_2) \, f_{22}(x_1, x_2) > f_{12}(x_1, x_2)^2\)
When is stationarity sufficient?
Fact
If \(f\) is differentiable and strictly concave on \(I\), then any stationary point of \(f\) is also a unique maximizer of \(f\) on \(I\)
Fact
If \(f\) is differentiable and strictly convex on \(I\), then any stationary point of \(f\) is also a unique minimizer of \(f\) on \(I\)
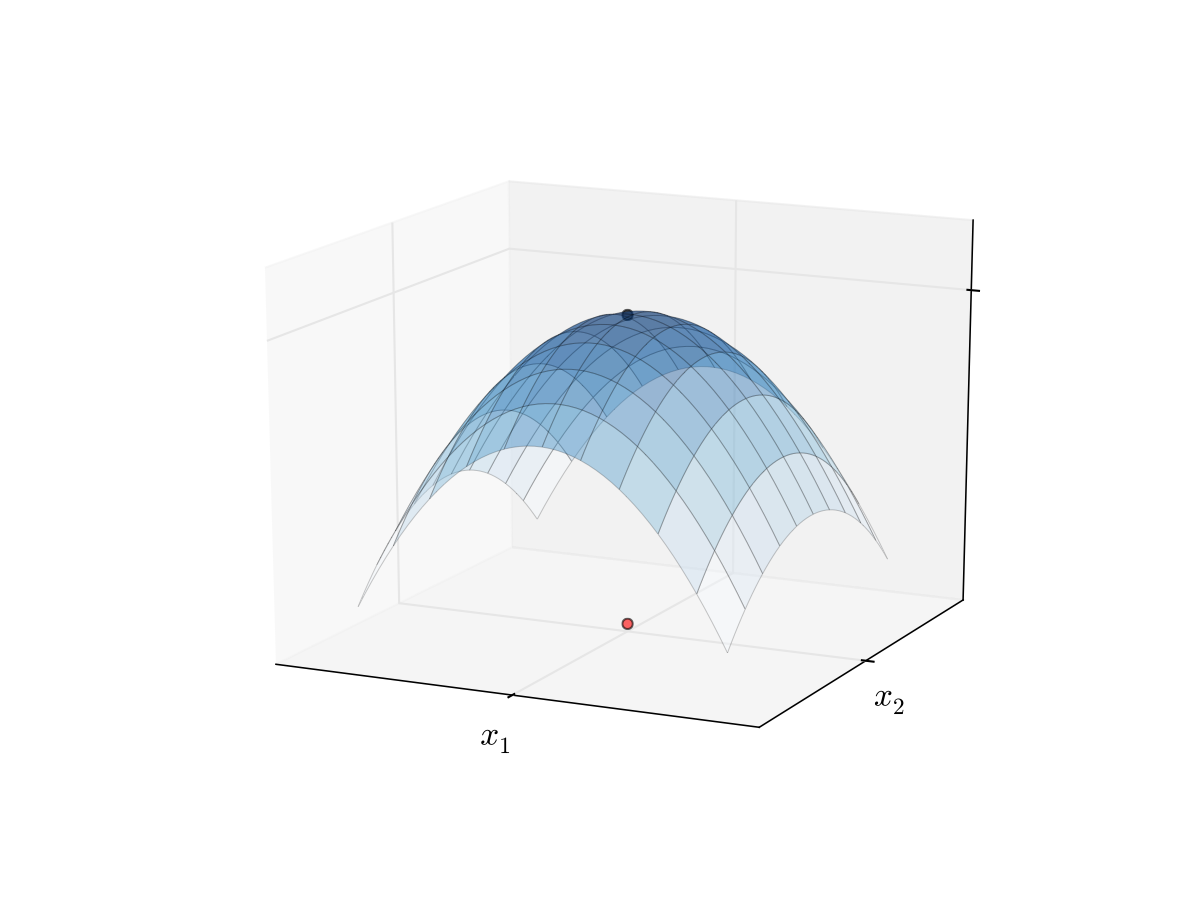
Fig. 18 Maximizer of a concave function#
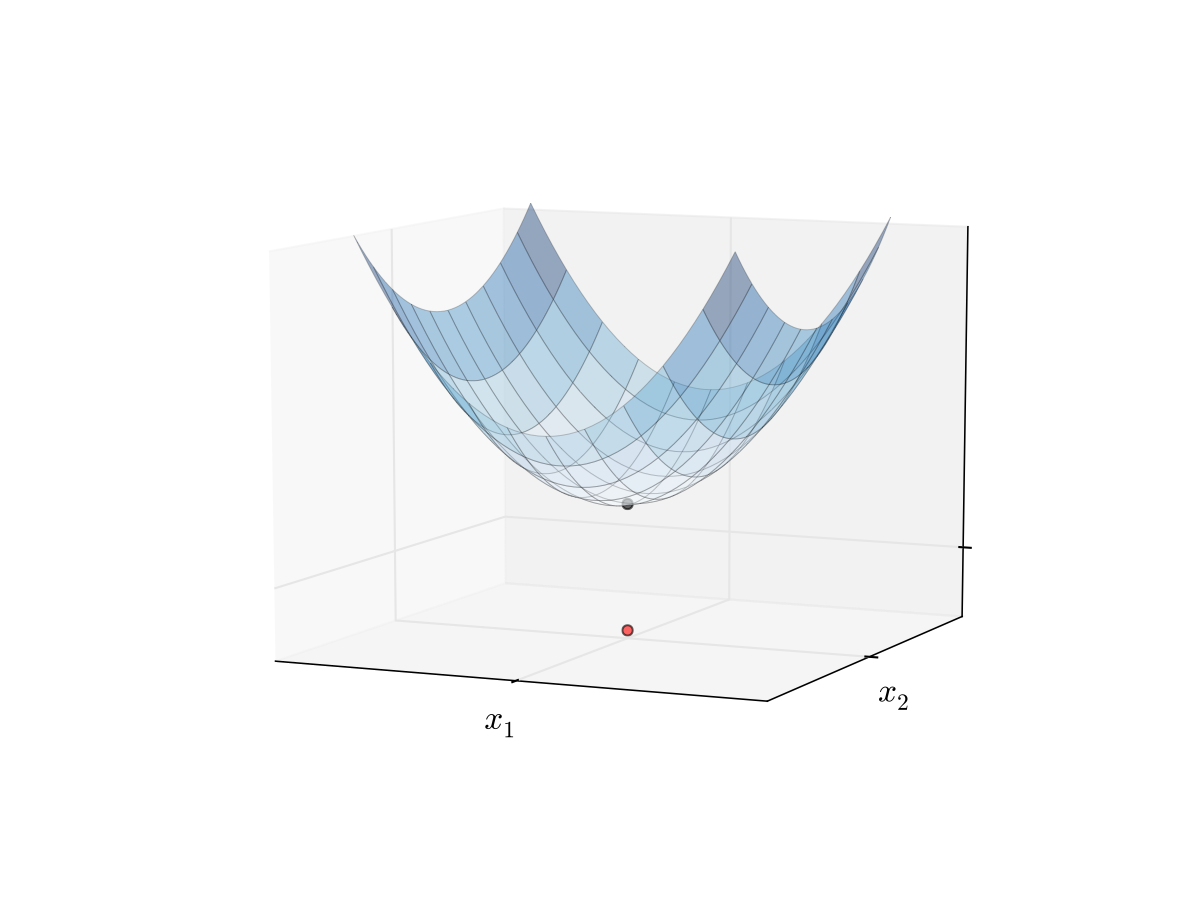
Fig. 19 Minimizer of a convex function#
Example: unconstrained maximization of quadratic utility
Intuitively the solution is \(x_1^*=b_1\) and \(x_2^*=b_2\)
Analysis above leads to the same conclusion
First let’s check first order conditions (F.O.C.)
How about (strict) concavity?
Sufficient condition is
\(u_{11}(x_1, x_2) < 0\)
\(u_{11}(x_1, x_2)u_{22}(x_1, x_2) > u_{12}(x_1, x_2)^2\)
We have
\(u_{11}(x_1, x_2) = -2\)
\(u_{11}(x_1, x_2)u_{22}(x_1, x_2) = 4 > 0 = u_{12}(x_1, x_2)^2\)
Example: Profit maximization with two inputs
where \( \alpha, \beta, p, w\) are all positive and \(\alpha + \beta < 1\)
Derivatives:
\(\pi_1(k, \ell) = p \alpha k^{\alpha-1} \ell^{\beta} - r\)
\(\pi_2(k, \ell) = p \beta k^{\alpha} \ell^{\beta-1} - w\)
\(\pi_{11}(k, \ell) = p \alpha(\alpha-1) k^{\alpha-2} \ell^{\beta}\)
\(\pi_{22}(k, \ell) = p \beta(\beta-1) k^{\alpha} \ell^{\beta-2}\)
\(\pi_{12}(k, \ell) = p \alpha \beta k^{\alpha-1} \ell^{\beta-1}\)
First order conditions: set
and solve simultaneously for \(k, \ell\) to get
Exercise: Verify
Now we check second order conditions, hoping for strict concavity
What we need: for any \(k, \ell > 0\)
\(\pi_{11}(k, \ell) < 0\)
\(\pi_{11}(k, \ell) \, \pi_{22}(k, \ell) > \pi_{12}(k, \ell)^2\)
Exercise: Show both inequalities satisfied when \(\alpha + \beta < 1\)
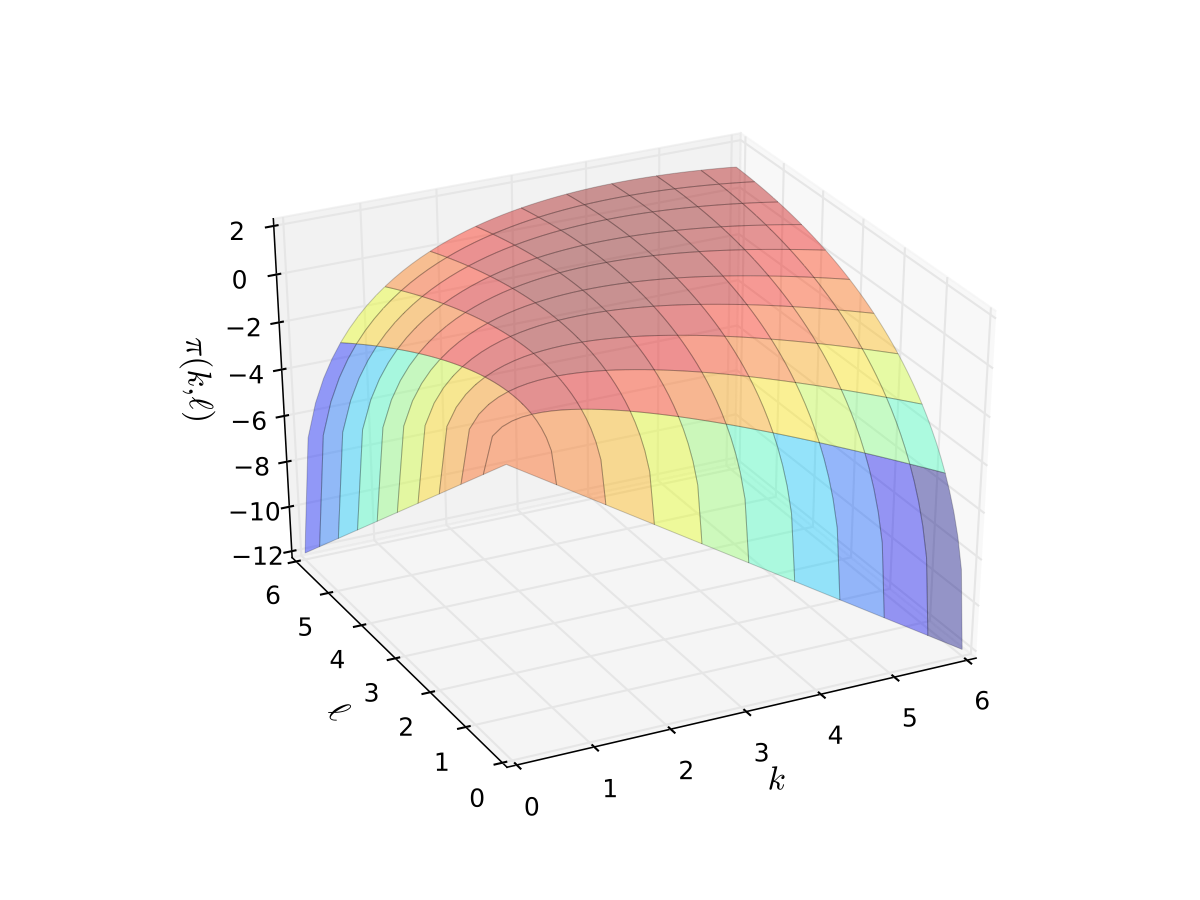
Fig. 20 Profit function when \(p=5\), \(r=w=2\), \(\alpha=0.4\), \(\beta=0.5\)#
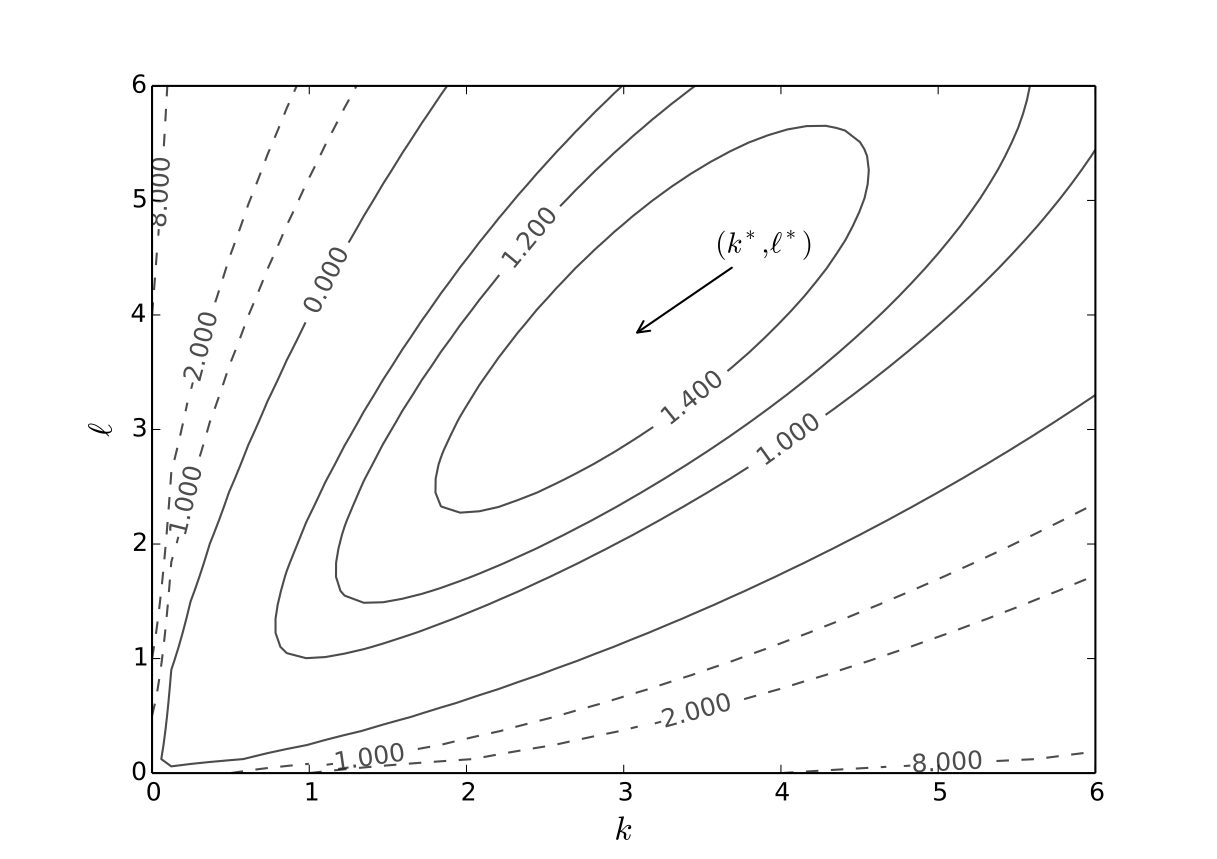
Fig. 21 Optimal choice, \(p=5\), \(r=w=2\), \(\alpha=0.4\), \(\beta=0.5\)#
References and further reading#
References
[Simon and Blume, 1994]: Chapter 2 (pp.10-38), revision
[Simon and Blume, 1994]: 3.5 (pp.51-57)
[Sundaram, 1996]: 1.4 (pp. 41-49)